
Возможность управления характером обтекания корпуса судна и его движителей открыла новые пути для совершенствования быстроходных судов, одним из направлений которого является повышение их ходовых и мореходных качеств. Не секрет, что традиционные пути оптимизации их обводов для заданной скорости хода в настоящее время могут считаться практически исчерпанными, тогда как установка интерцепторов на глиссирующих поверхностях [1, 2] значительно улучшает их гидродинамические характеристики. Так, установка интерцепторов на днище судна в районах транца и миделя при выдвижении их приводит к возникновению перед ними зон повышенного давления, которые уменьшают осадку и, соответственно, смоченную поверхность судна. Возникающая за миделевыми интерцепторами воздушная каверна, заполняемая атмосферным воздухом, также ведет к уменьшению смоченной поверхности днища. В итоге же обеспечивается снижение общего сопротивления судна. Кроме того, секционируя интерцепторы в диаметральной плоскости судна, их побортным выдвижением и убиранием (в противофазе), можно управлять креном и дифферентом судна во времени, что позволяет использовать интерцепторы в том числе и как успокоители качки (рис. 1).
 |
|
|
|
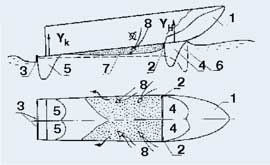
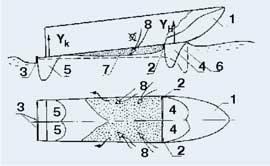
Рис. 1. Принцип работы системы интерцепторов:
1 — корпус катера; 2 — носовые интерцепторы (НИ); 3 — кормовые интерцепторы (КИ); 4,5 — эпюры давлений перед НИ и КИ; 6 — эпюра давления от корпуса катера; 7 — днищевая каверна за НИ; 8 — подсос воздуха в каверну; Yk и Yн — подъемная сила на корпусе от 4 и 5.
|
Рис. 2. Система автоматического управления интерцепторами:
1 — пульт преобразования параметров качки в управляющие сигналы приводов интерцепторов; 2 — приводы носовых (НИ) и кормовых (КИ) интерцепторов; 3 — блок гиродатчиков (4, 5 — каналы крена и дифферента; 6, 7 — каналы угловых скоростей крена и дифферента).
|
|
|
|
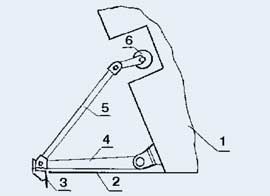
Рис. 3. Схема привода кормового интерцептора:
1 — корпус катера; 2 — транцевая плита; 3 — интерцептор; 4 — рычаг; 5 — тяга; 6 — привод.
|
В качестве эксперимента такие системы были реализованы на самоходных полунатурных моделях, а также на быстроходном катере пр. 205 Экби массой 190 т со скоростью полного хода 42-46 узлов. Схема привода кормового интерцептора приведена на рис. 2. Примененная на катере обобщенная система автоматического управления интерцепторами (САУИ) приведена на рис. 3 и включает в себя датчики углов и угловых скоростей крена и дифферента судна, а также ЭВМ, преобразующую эти параметры в сигналы, управляющие приводами интерцепторов, и пульта управления, позволяющего изменять коэффициенты управления приводами и контролировать работу системы. Для самоходных моделей САУИ разрабатывалась исполнителями моделей, для катера пр. 205 Экби — 301-й кафедрой Московского авиационного института.
|
|
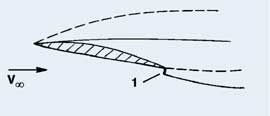
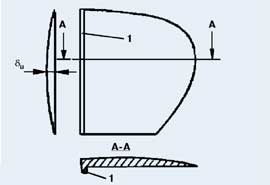
Рис. 4. Кавитирующий профиль с интерцептором 1 на задней кромке. Пунктирными линиями показаны границы каверны при обтекании изолированного профиля, сплошными линиями — при обтекании профиля с интерцептором. |
Результаты натурных испытаний показали:
— на тихой воде симметричные относительно ДП судна выдвижения интерцепторов, обеспечивающие оптимальную посадку судна, позволяют на 20-30% снизить сопротивление воды движению, что может при соответствующем выборе движителей обеспечить прирост скорости полного хода на 3-4 узла. Однако на переходном режиме движения возможна некоторая потеря продольной остойчивости судна, что можно компенсировать выдвижением носовых интерцепторов на 1/2 высоты (окончательно подбирается экспериментально);
— на волнении, при соответствующей настройке коэффициентов в системе САУИ, возможно снижение параметров бортовой качки на предельных волнениях и скоростях хода в 3-5 раз (максимальные значения соответствуют волнению, близкому к регулярному, на курсовых углах, близких к 90°) и параметров килевой качки — до 1.5 раз.
|
|
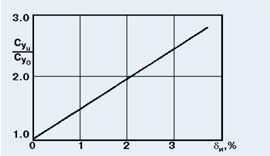
Рис. 5. Зависимость относительного коэффициента подъемной силы профиля Cyи/Cy0 от высоты интерцептора δи, %. |
Полученные результаты позволили перейти к реализации разработанных конструкций и законов управления САУИ на серийных катерах ЦМКБ “Алмаз” пр. 10470 (кормовые интерцепторы) и пр.14310 (носовые и кормовые интерцепторы).
Кроме того, испытания на волнении показали, что при работающих интерцепторах в 1.5-3 раза улучшается курсовая устойчивость движения судов, а также значительно уменьшаются средние вертикальные ускорения на их корпусе.
Маневренные испытания судов с убранными носовыми интерцепторами на переходных режимах движения показали, что при углах перекладки рулей 10-20° время циркуляции уменьшилось в 1.5 и 1.14 раза соответственно с соответствующим уменьшением крена.
Применительно к скоростным судам можно дать следующие рекомендации:
— для судов с широкой транцевой кормой для скоростей хода, соответствующихFr > 2.5, возможна установка миделевых и транцевых интерцепторов с САУИ. В качестве приводов интерцепторов могут быть использованы быстродействующие приводы или электромагнитные сердечники двойного действия, так как наибольшая эффективность умерения качки в натурных условиях была получена при работе приводов в режиме, близком к импульсному (убраны — выдвинуты наполовину — выдвинуты полностью);
— для судов со скоростями хода, соответствующими FrD > 1.5, рациональна установка только кормовых интерцепторов с САУИ;
— судоводителям-любителям можно рекомендовать установку кормовых интерцепторов с механическим приводом из рубки управления для оптимизации посадки судна на промежуточных скоростях хода (симметричные выдвижения) или для снижения диаметра циркуляции и крена на ней (несимметричные выдвижения).
Важнейшим элементом быстроходного судна является движитель. Наиболее распространенный тип движителя — обычный полностью погруженный гребной винт — должен быть значительно заглублен для предотвращения попадания в его гидравлическое сечение атмосферного воздуха, который в этих случаях ухудшает тяговые характеристики винта. При эпизодическом попадании воздуха к гребному винту его характеристики становятся нестабильными. При достаточном заглублении оптимального по КПД гребного винта детали привода, например, наклонный гребной вал с кронштейном, оказываются настолько развитыми, что их доля в сопротивлении судна составляет 20% и более. Это снижает эффективность движителя: пропульсивный коэффициент не превышает 0.5-0.55 при высоком КПД самого винта ~ 0.7-0.75.
Другой особенностью глубоко погруженного гребного винта является невозможность развития больших оборотов на промежуточных скоростях движения: возрастание момента на гребном валу влечет за собой недостаточность тяги для быстрого разгона судна. Эта проблема решается либо за счет использования двухскоростного редуктора [3], либо путем подвода воздуха к лопастям гребного винта [4]. Оба эти пути реализации мощности двигателя на промежуточных скоростях существенно уменьшают время разгона судна до полной скорости.
Очевидно, чтобы повысить эффективность движителя, нужно уменьшить его заглубление, снизив таким образом сопротивление выступающих частей его привода. Как это сделать? Известны два пути. Одним из них является разработка гребных винтов, приспособленных к работе вблизи поверхности воды при ограниченных режимах.
Для получения конкретных данных были применены интерцепторы, устанавливаемые на нагнетающей поверхности лопастей в районе выходящих кромок (рис. 4). Как показали исследования, применение интерцепторов делает кавитационную каверну более тонкой и, что наиболее существенно, она смещается в сторону нагнетающей поверхности, приводя к увеличению подъемной силы профиля. Последнее подтверждается экспериментальными данными. На рис.5 приведено отношение коэффициента подъемной силы профиля с интерцептором к аналогичной зависимости того же профиля без интерцептора в функции от относительной высоты последнего в процентах от хорды δи = δи/b0 (где δи — высота интерцептора, b0 — хорда профиля).
Физическая причина увеличения подъемной силы профиля с интерцептором состоит в повышении гидродинамического давления на его нагнетающей стороне из-за подтормаживания потока. Роль засасывающей стороны в создании подъемной силы незначительна. Поэтому попадание воздуха в гидравлическое сечение гребного винта с интерцептором при его работе на расчетном режиме оказывает существенно меньшее влияние на его тягу, чем в случае гребного винта с традиционной профилировкой лопастей.
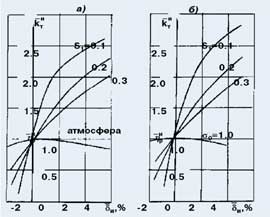
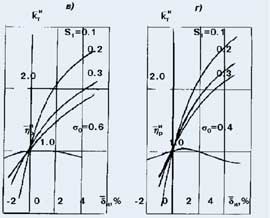
С целью выявления закономерности влияния интерцепторов на кривые действия гребных винтов были выполнены систематические экспериментальные исследования [5]. Для этого был спроектирован гребной винт с клиновидными сечениями лопастей (рис.6), высота интерцепторов по радиусу которого изменяется по эллиптическому закону. На рис.7 приведены графики зависимостей: в функции от δи в процентах от хорды расчетного сечения лопасти при различных числах кавитации σ0 и скольжениях S1 = 1-J/J1. Здесь Кт, Кт, ʋр, ʋр — соответственно коэффициенты упора и КПД гребного винта с интерцепторами и без них; J1 — относительная поступь нулевого упора.
Видно, что интерцепторы, высота которых составляет около 2 % хорды сечений лопастей, позволяют повысить упор (или тягу) гребных винтов вдвое без снижения их КПД.
Важным преимуществом интерцепторов является возможность путем регулирования их высоты существенно изменять гидродинамические характеристики гребного винта. Это позволяет достаточно просто согласовывать параметры гребного винта и двигателя в зависимости от нагрузки судна, состояния акватории и других эксплуатационных условий путем подбора высоты интерцептора. Такая возможность имеет особенно важное значение в любительском судостроении, когда чаще всего невозможно достаточно точно определить в процессе создания судна сопротивление корпуса, характеристики гребного винта и параметры двигателя.
Предельным случаем компоновки гребного винта является его работа в частично погруженном виде. При этом сопротивление выступающих частей оказывается практически нулевым, поэтому пропульсивный коэффициент может быть наибольшим; по данным [6] его величина достигает 0.75-0.8. Вместе с тем, в случае частичного погружения гребных винтов, гидравлическое сечение оказывается меньше полной площади диска гребного винта, поэтому приходится увеличивать его диаметр. Кроме того, при частичном погружении гребного винта силы на лопастях нестационарны, возникают ударные нагрузки, что может привести к повышенной вибрации; на гребной винт действует значительная боковая сила, что при одновальном судне усложняет обеспечение движения прямым курсом.
Другим направлением повышения пропульсивных качеств движителя быстроходного судна является создание конструкций, размещенных внутри корпуса судна или за его транцем при расположении водоприемника под днищем судна в районе, где попадание воздуха наименее вероятно. К таковым относятся водометные движители, характерными представителями которых являются движители, разработанные фирмой KaMeWa, получившие широкое распространение в мировом скоростном судостроении благодаря хорошим гидродинамическим характеристикам (их КПД в ряде случаев доходит до 0.7), а также эффективной системе управления двигательно-движительного комплекса. Вместе с тем эти движители, как правило — низкооборотные, имеют большие габариты, вес и стоимость. Их тяговые характеристики существенно изменяются при попадании воздуха в гидравлическое сечение, чего практически невозможно избежать при некоторых режимах на многих быстроходных судах.
В ЦНИИ имени акад. А.Н. Крылова разработан новый вид водометного движителя, лопасти рабочего колеса которого приспособлены к работе при постоянном поступлении воздуха в гидравлическое сечение движителя. Этот движитель назван вентилируемым водометным движителем — ВВД. В отличие от традиционного водометного движителя, ВВД не имеет спрямляющего аппарата и сопла, формирующего струю. Конструктивно ВВД состоит из водовода, на выходном сечении которого располагается рабочее колесо с приводом от гребного вала (рис.8) .
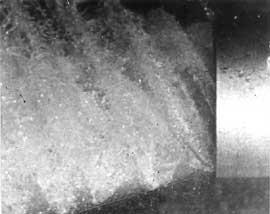
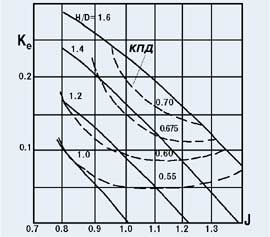
На основном режиме движения судна предусматривается надводный или полупогруженный выброс струи движителя из водовода. В этих условиях воздух со стороны выбросного участка водовода попадает к лопастям рабочего колеса и образует на них воздушные каверны. За движителем создается система реактивных струй, число которых равно числу лопастей рабочего колеса (рис.9). Рабочие колеса ВВД имеют лопасти с клиновыми сечениями, на которых предусматривается возможность установки интерцепторов. Пропульсивные характеристики ВВД находятся на уровне лучших движителей быстроходных судов; на рис.10 приведена диаграмма безразмерных тяговых характеристик ВВД, полученная в результате испытания серии моделей. Как и в случае гребных винтов, установка интерцепторов позволяет регулировать гидродинамические характеристики в широких пределах.
Высокие пропульсивные характеристики, простота конструкции, стабильность характеристик при любых условиях эксплуатации, удобство компоновки двигательно-движительного комплекса (движитель может располагаться внутри корпуса, быть размещенным за транцем, частично выдвинут под днище судна), возможность путем выбора высоты интерцепторов регулировать тяговые характеристики в широких пределах делают ВВД перспективным для быстроходных судов, в частности, в любительском судостроении. ВВД оборудовано судно на воздушной каверне проекта “Серна”.
Следующей областью применения интерцепторов являются клиновые рули быстроходных судов. Установка за рулями интерцепторов, выдвигаемых при перекладке, повышает эффективность рулей и уменьшает величины необходимых углов перекладки.
Приведенные примеры использования интерцепторов при отрывном обтекании элементов судов показывают перспективность их использования в различных областях судостроения.
Канд. техн. наук М.Мавлюдов, 1. В.А. Лукашевский, Т.И. Банникова, Ю.М. Банников, М.Ю. Цейтлин. Исследование гидродинамических характеристик глиссирующих поверхностей с интерцепторами на задней кромке. Труды ЦАГИ, вып.1906, 1978.
2. А.В. Пономарев. Применение автоматически управляемых интерцепторов на быстроходных судах различных типов. 2-я Международная конференция по быстроходным судам, Китай, 1992.
3. Двухскоростная коробка передач. Журнал “Катера и яхты” № 2 (168), 1999.
4. Новые вентилируемые винты “Меркюри”. Журнал “Катера и яхты” № 2 (168), 1999.
5. М.А. Мавлюдов, А.А. Русецкий, Ю.М. Садовников, Э.А. Фишер. Движители быстроходных судов. Л., Судостроение, 1982.
6. John L.Allison. Propellers for High-Performance Crafts. Marine Technology. Vol/15 N4 Oct. 1978, pp. 335-380.
>
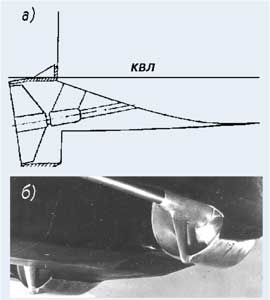
а — схема компоновки; б — фотография модели катера с вентилируемым водометным движителем.
Кт = Кт-и / Кти и • ηр-и = ηр-и / ηр
докт. техн. наук Ю.Садовников,
канд. техн. наук В.Титов
Авторы посвящают эту работу памяти
Андрея Васильевича Пономарева